
- AI
- A
Programming and training of a bipedal mini-robot in the robotics club of Sber's Robotics Center
Through this project, we invite the university community of Moscow — students, master's students, doctoral students, lab assistants, professors, and lecturers — to gain experience in modern robotics. We also create Russian educational materials on bipedal robotics, from design, electronics, and software to reinforcement learning.
The expert support is provided by the Robotics Center of Sber. The project participants are:
RTU MIREA Institute of Artificial Intelligence and RTUITLab
Center for Youth Robotics at Bauman Moscow State Technical University
"Lyceum 'Second School' named after V.F. Ovchinnikov
We invite other educational institutions to join our project.
The project discussion is held in the ROS community chat. News and photos about the project will be published there.
Historical background
For many years, at the Sber Robotics Center, we have been conducting research on MPC and reinforcement learning on quadruped robots from Unitree. Together with ITMO, we wrote a scientific paper on MPC and posted the source code for those who want to continue the research. Overall, we are satisfied with Unitree's products for research, but during the process, we realized that, despite a good SDK API, the low-level controller firmware is proprietary, which hinders customization. Also, during intensive use, Unitree robots break down, and repair through the Russian distributor is not always convenient from an organizational perspective. As a result, research is halted while the robot is being repaired. We would like to have a research device that can be independently assembled from components, controlling the entire source code from the lower level on microcontrollers to the upper level, which runs on a single-board computer. We also need the ability to change the robot's kinematics for experiments and to repair it independently in a short time.
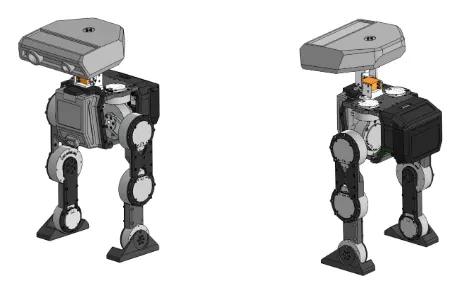
Recently, a partially open Chinese mini-robot project called Tinker appeared. We studied the materials about it and thought, why not replicate it to check if such a cheap robot can work decently? And if it works, we could create a Russian educational robot based on it, for scientific research in collaboration with Russian universities.
Now let's dive into the features of the project.
Technical features of the project
Application of modern technologies from walking robotics.
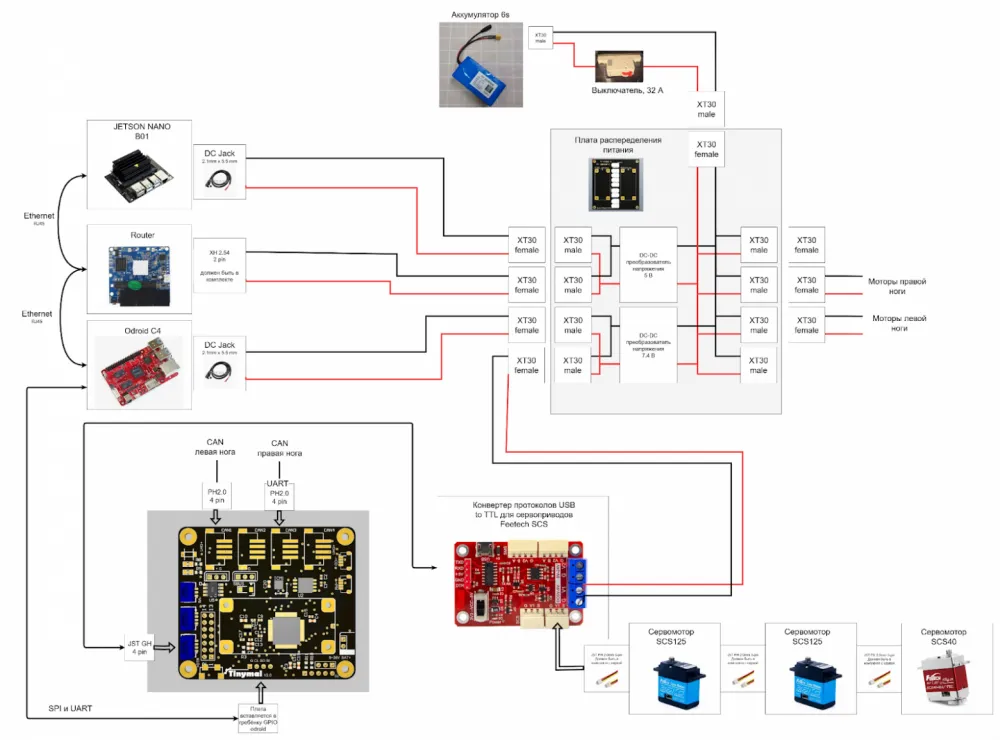
Honest Quasi Direct Drive motors made in China, like those in large modern walking robots: planetary gearbox, brushless motor, motor driver with FOC, dual encoder.
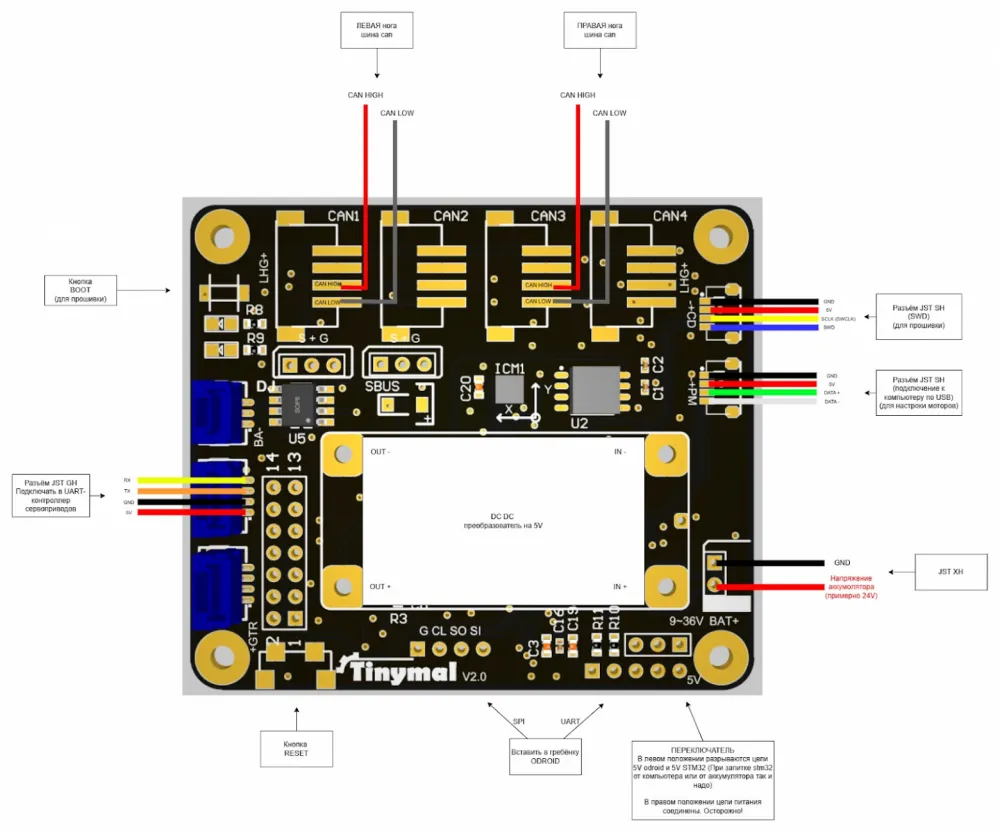
Spi2can board for controlling all motors: open-source scheme, several units produced in Russia, soldered at RTU MIREA.
The majority of the structural components were printed on 3D printers at RTU MIREA and Bauman Moscow State Technical University. Aluminum parts were made at RTU MIREA. Carbon parts have been temporarily replaced with plastic ones printed on a 3D printer.
Currently, two computers are used: Odroid and Jetson Nano. In the future, we may replace them with a single Jetson Nano.
The software is open-source, partially binary files from Chinese manufacturers. In the future, we may replace it with Russian code.
The walking algorithm is Reinforcement learning, PPO trained in Isaac Lab.
Advantages and competitive advantages over other projects:
cheap;
small;
simple;
repairable;
customizable;
safe;
promising;
the entire chain, from design and electronics to software, can be replicated in Russia (except for motors and gearboxes).
Current project status
The Robotics Center of Sber provided three sets for assembling robots in educational institutions, advises and manages at a high level, sets tasks.

At RTU MIREA:
Printed parts on a 3D printer.
Made aluminum parts.
Soldered Spi2can boards.
Assembled the robot.


At the Youth Robotics Center at Bauman Moscow State Technical University:
Printed parts on a 3D printer.
Wired motors.
Wrote instructions for reproduction.
Studied software for configuring the Spi2can board.
Checked the conveyor training and Sim2sim.
Assembled the robot.

At "Lyceum 'Second School'" named after V.F. Ovchinnikov:
Printed parts on a 3D printer.
Soldered Spi2can board.
In the near future, we plan to complete the assembly of all three robots at three sites, calibrate and configure them, and master walking.
Long-term goals:
Teach robots to dance.
Rewrite software for ROS2.
Conduct advanced research and write scientific articles.
Add arms to the
The Robotics Center of Sber consults, formulates the goals and tasks of the project. Universities independently find and organize students to work on the project. Partners also independently provide students with the necessary equipment and parts.
What does the project offer to students?
Students will gain experience and knowledge in demand at the Sber Robotics Center and will be able to complete their industrial practice there. Students will also be able to practice with the Tinker robot as much as they want at the RTU MIREA or the Youth Robotics Center of Bauman Moscow State Technical University.
The best students will have the opportunity to intern with us or start working after 1-2 years of participating in the project.
Finally, you will be able to write scientific articles based on the experience gained.
Our workdays




The project has its difficulties. Not everything in the Chinese manual can be reproduced. Unfortunately, the Spi2can board's firmware is proprietary, but we managed to get it running. One motor was unsuccessfully flashed, and now there's no data exchange with it, and re-flashing is not possible. Another motor was faulty or damaged during assembly, and it hasn't been restored yet. We burned a diode on the board and had to re-solder it.
But the main challenges seem to have been overcome, and success awaits us.
What help do we need right now?
We need extra hands for assembly, debugging, and programming the robot.
If you are a student, postgraduate, laboratory assistant, or professor and want to spend the summer working on a walking robot project, send your resume via private messages to Telegram. We provide components for assembly, an incomplete manual, and a platform with all the necessary equipment at RTU MIREA, near the Yugo-Zapadnaya metro station.
Your tasks: assemble the robot, write good documentation, debug the software, and implement basic walking. If you enjoy it, you can continue working, diving deeper into robot programming and reinforcement learning.
Read more about the club here.
Not everyone is accepted; there is a selection process through a simple test task. If you don't know how to program or have minimal knowledge of robotics, don't apply.
You won't be alone; there's already a team working on the project across three platforms. I want to emphasize that this is not training or courses: if you lack knowledge, you'll need to study it on your own. Consider this as practical experience or a hobby, for a thesis, scientific article, etc.







Write comment